What are degrees of freedom? They are independent position variables necessary to describe the state of a physical system. They serve to uniquely define it in space. In mechanics, they depend on the nature of the imposed constraints (any type of constraint affecting the motion of a body) and the number of parts that make up the system. In the case of a mechanism consisting of several bodies, degrees of freedom denote the number of independent relative motions possible between the parts of the device. The determination of variables is a particularly important step in the analysis of body systems in mechanical, structural and aeronautical engineering, as well as robotics.
Degrees of freedom vs. functions of a robotic arm
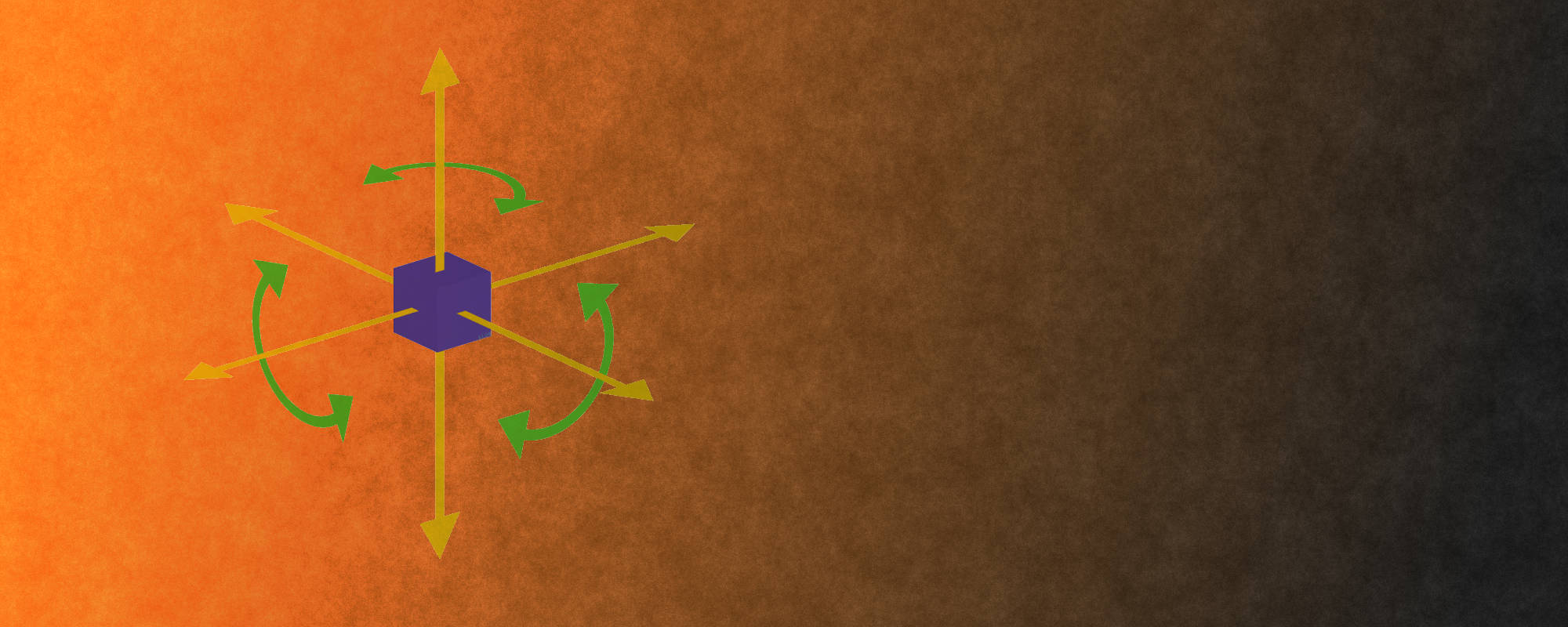
In order to completely define the position of objects in space, it is necessary to define at least six degrees of freedom, Cartesian coordinates or X, Y, Z position, and orientation, i.e. roll, pitch and yaw – R, P, Y.
With respect to robot arms, degree of freedom (DoF) means an independent joint that provides collision-free movement for the manipulator – both in a translational (linear) and rotational sense. Each geometric axis around which it can rotate or extend is counted as a single degree of freedom. It helps determine the ability to operate the end of the arm. This variable is also defined in terms of the robot’s work area and configuration and task space.
Most robot arms consist of joints that provide a single degree of freedom (rotary and prismatic). Serial and parallel manipulator systems are typically designed to position an end effector with six degrees of freedom – three in orientation and three sliding.
Determining the degrees of freedom (along with other key parameters) allows the robotic system to be modeled, and artificial intelligence (AI) algorithms to be implemented for autonomous control of the manipulator arm. A robot with three movable joints will have three axes and three degrees of freedom, a four-axis robot will have four movable joints and four axes, and so on.
- One axis – can move the object in a straight line
- Two axes – can lift the object (lift it), move it horizontally and vertically, and put it down on one plane, without changing the orientation of the object.
- Three axes – can lift an object, move it horizontally and vertically, and put it anywhere in space, without changing the object’s orientation.
- Four axes – can pick up an object, move it horizontally and stand it up, changing the object’s orientation along one axis.
- Five axes – can pick up an object, move it horizontally and put it down, changing the object’s orientation along two axes.
- Six axes – can pick up an object, move it horizontally and lay it down, changing the object’s orientation along three axes.
- Seven-axis – combines all the functions of a six-axis robot with the ability to physically move an object (tool) with full preservation of its orientation in linear motion (straight line) from one place to another.

